




















Go List
 2024-06-03
2024-06-03
來源:英飛凌汽車電子生態圈
在不斷發展的汽車技術領域,電子系統標準化和互操作性的需求變得至關重要。隨著車輛集成越來越複雜的軟體功能,諸如 AUTOSAR(AUTomotive Open System Architecture 汽車開放系統架構)之類的框架已成為汽車行業的基礎支柱。AUTOSAR 的歷程不僅展示了標準化工作,還展示了為滿足現代車輛架構和軟體開發範例的需求而不斷發展的過程。AUTOSAR 的起源可以追溯到 2000 年代初,當時主要汽車製造商和供應商認識到開發汽車軟體時採用標準化方法的必要性。它是一個開放、標準化的汽車軟體架構,支持應用軟體和基本車輛功能之間接口的標準化,有助於為所有 AUTOSAR 成員建立通用的 ECU 軟體架構。主要目標是解決車輛電子設備日益複雜和電子控制單元(ECU)激增帶來的挑戰。
從本質上講,它是一個標準化的開源平台,可實現現代車輛內各種電子控制單元(ECU)之間的無縫通信和集成。它提供了結構化的軟體架構,使汽車製造商和供應商能夠高效協作、縮短開發時間並提高軟體質量。通過其分層方法,AUTOSAR 簡化了複雜的軟體生態系統,促進模塊化和可擴展性,同時確保不斷發展的汽車領域的安全性和可靠性。

AUTOSAR 旨在為成員提供固有的優勢,以管理日益複雜的 E/E 車載環境,例如複雜 ECU 網絡中功能的輕鬆集成和交換以及整個產品生命周期的控制。
多年來,AUTOSAR 經歷了多次疊代,每次疊代都旨在完善其架構、通信協議和軟體開發方法。AUTOSAR 發展的重要里程碑包括:
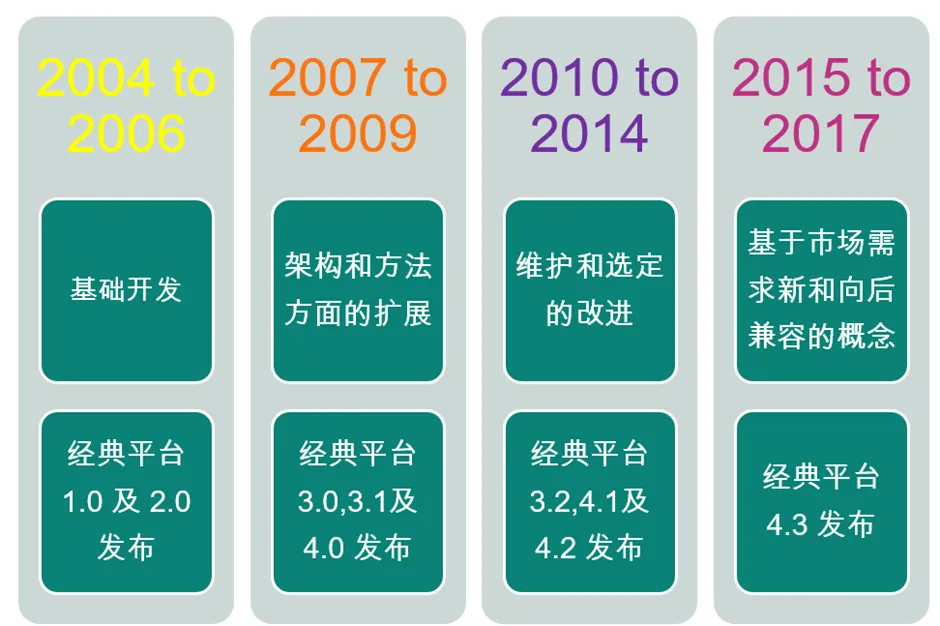
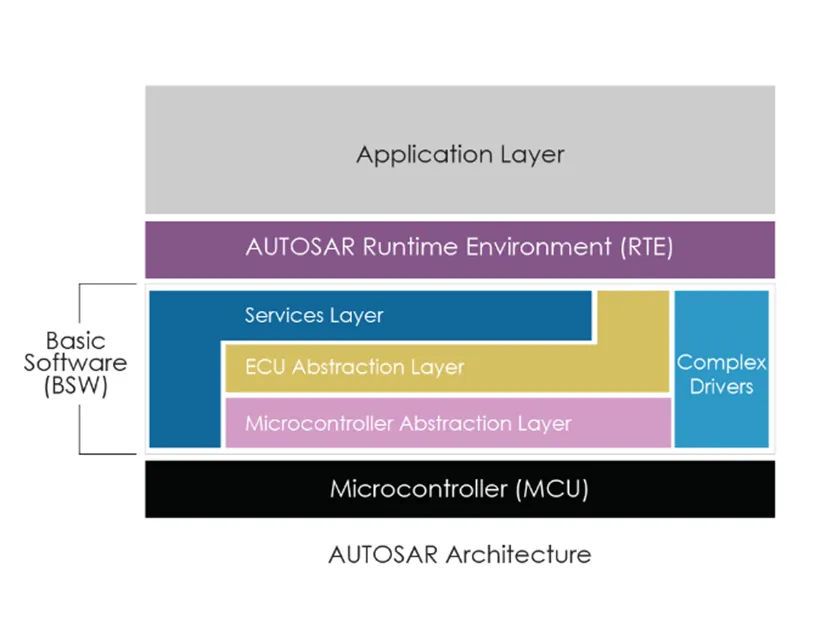
AUTOSAR 的初始階段側重於定義分層軟體架構,以促進跨不同車輛領域的汽車軟體的開發、集成和可擴展性。分層架構方法允許關注點分離,並實現軟體組件更大的模塊化和可重用性。經典的 AUTOSAR 平台在微控制器上運行,分為 3 個主要層:
最近,有必要支持可以在硬體或軟體擴展中實現的概念,使 AUTOSAR 能夠配置和利用高級硬體功能,而不受任何特定實現目標的限制。
轉向集中式和區域式 E/E 架構需要 OEM 為其架構上的許多功能更強大的 ECU 規劃更大規模的同步新一代 ECU,這通常與為 OEM 帶來更多軟體以及更多的內部 ECU 開發相一致。
AUTOSAR 自適應平台的推出是為了支持更多應用程序,例如汽車行業日益可用的高性能計算的功能和靈活性。隨後,經典平台和自適應平台的通用功能已轉移到基本標準中,以確保保持互操作性。

雖然 AUTOSAR 自適應平台擴展了 AUTOSAR 支持的 ECU 類型,但 AUTOSAR 經典平台仍然適用於許多傳統 ECU,但專注於將高計算功能和服務整合到中央/區域/域 ECU 中並不能完全消除功能相對簡單的 ECU 控制和監視輸入和輸出。Classic Platform 非常適合具有安全相關功能的控制功能,同時支持高達 ASIL D 的可用和網絡安全擴展,以確保免受惡意或系統故障造成的干擾。
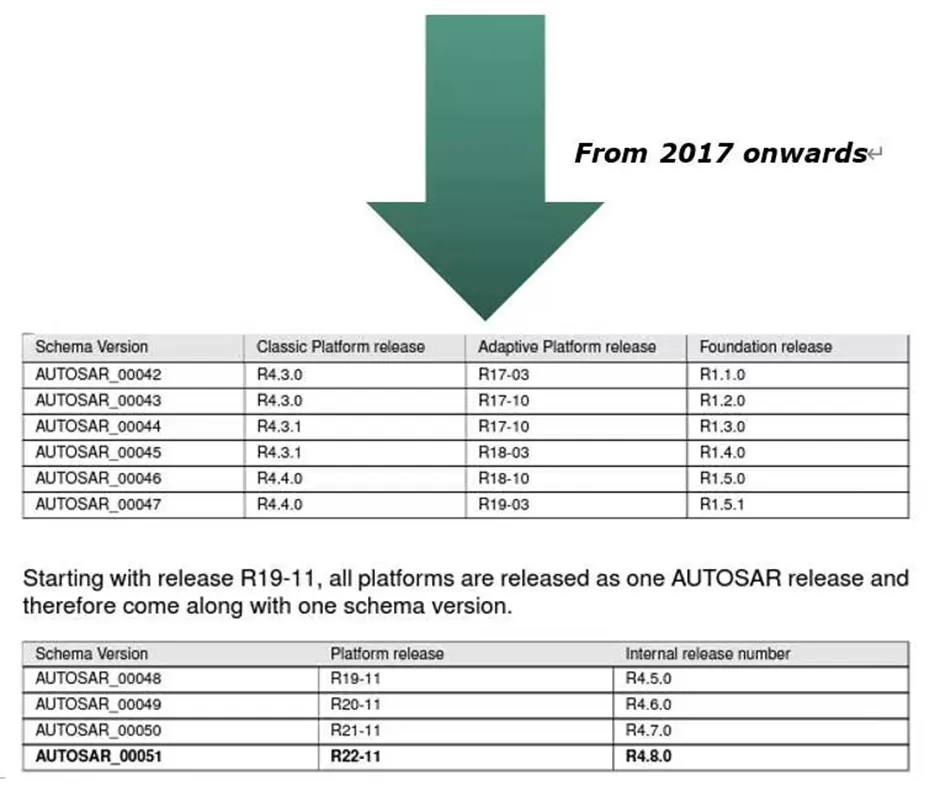
經典平台作為編號版本發布到 4.4.0,其中第一個 4 代表主要平台版本,概念的更改,不兼容前代。第二個 4 代表增量版本,其中添加了新概念,這意味著同代標準本身也不完全兼容。最後的 0 代表次要版本,對標準進行澄清和修復,而不是概念更改或添加。該標準的所有 3 部分現已作為年度版本一起發布,即 R20-11,對應於 2020 年 11 月。大多數 OEM 為一代 E/E 架構使用特定版本已成為正常做法,通常是稍後(或有時更早)版本或特定於 OEM 系統設計的一些增強和/或定製。
在最近的版本中,根據 AUTOSAR 創建的目標,我們更加努力地協調經典平台和自適應平台之間的架構和功能,從而簡化兩個平台在生產 E/E 架構中協同工作的部署。
R20-11 版在經典平台中新增對 ieee802.3 g 規定的以太網 10BASE-T1S 的支持,使以太網中的總線拓撲成為可能。經典平台和自適應平台都將支持 OSI 模型第 1 層和第 2 層上的這一新擴展。
新增加了以太網喚醒(Ethernet Wakeup On Dataline)功能,擴展了以太網通信棧,結合現有通信功能(如部分網絡)使用符合 OA TC10 的以太網硬體(PHY)。
在車輛網絡狀態管理中,通過動態學習額外路由的可能性,擴展了基於靜態路由的現有 PNC 協調算法。
引入了"入侵檢測系統管理器 "概念,規定了基於 AUTOSAR 的入侵檢測系統(IDS)的框架。
此外還定義了車輛運動控制接口、10BASE-T1S、經典平台靈活性,並針對經典平台和自適應平台的交互進行了升級,加強了兩個平台之間的互動。
R21-11 版在 R20-11 基礎上,進一步定義和增強了經典平台的功能:
通過下層組件 MemAcc 和 Mem 擴展了現有內存堆棧,為多個上層模塊提供內存訪問協調,並提供與內存技術無關的內存驅動程序接口,從而支持空中下載(OTA)軟體更新等新用例。
儘管取得了許多成就,但 AUTOSAR 在快速變化的汽車領域不斷發展時也面臨著一些挑戰。一項重大挑戰是在標準化和靈活性之間取得適當的平衡。雖然標準化促進了互操作性和兼容性,但它也會抑制創新並阻礙汽車製造商之間的差異化。另一個挑戰是適應軟體定義車輛日益複雜的情況,以及高級駕駛輔助和自動駕駛系統對人工智慧(AI) 和機器學習(ML)算法的日益依賴。AUTOSAR 會不斷發展以支持這些新興技術,同時保持其模塊化、可擴展性和可靠性的核心原則。
如上介紹的,汽車開放系統體系結構(AUTOSAR)是汽車工業遵循的標準,AUTOSAR 分層架構的其中一層是 MCAL(微控制器抽象層)。AUTOSAR 為屬於 MCAL 層的設備驅動模塊提供了非常詳細的規範。通過提供 MCAL 層提供標準化的軟體接口和配置,使中間件軟體(BSW)和應用層獨立於底層硬體平台。
英飛凌為 AURIX™ TC4x 系列微控制器提供了 MCAL 層實現,其符合 AUTOSAR 4.6.0(R20-11)的定義,內存驅動程序是符合 4.7.0(R 21-11)版本的。英飛凌還為沒有 AUTOSAR 標準的外設模塊提供複雜的驅動程序。
所有MCAL驅動模塊的開發都符合 ISO-26262 Automotive SPICE 3.1 Level 3 和 ISO-21434 中定義的流程。所有源代碼的開發都符合 MISRA C 編程語言和 SEI CERT-C(2016)編碼標準。
TC4x MCAL 驅動程序提供了完整的源代碼,基於 Tresos 配置工具的配置支持,文檔和演示軟體,使用戶能夠快速入門。
TC4x MCAL 從四個方面進行了軟體提升:
相較於TC3x MCAL,不僅有延續性和繼承性,還有以下增強:
掃描二維碼,關注英飛凌汽車電子生態圈尋找更多應用或產品資訊
